Auf diesen Seiten wird der Aufbau der IBF-Fahrtregler4_7 beschrieben.
Es handelt sich hier um einen Prozess ständiger Verbesserungen. Entsprechend dem Versionsstand können geringfügige technische Abweichungen vorhanden sein. Jede zu Testzwecken abgegebene Baugruppe ist als Entwicklungsversion zu betrachten.
Diese Baugruppe wurde als Teilkomponente für den Aufbau eines Schaukampf-Roboters designed. Weitere Anwendungen in Modellen, z.B. Kettenfahrzeuge, sind möglich.
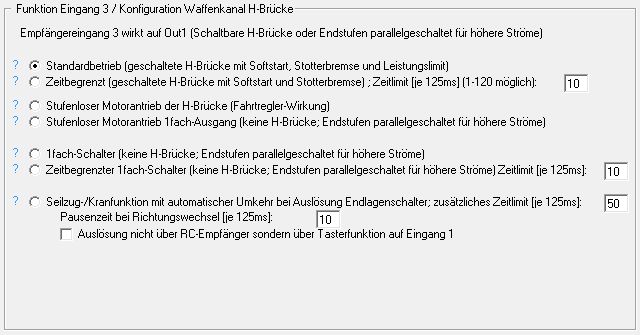
Der Fahrtregler4_7 ist eine Dreikanal-Version, wobei zwei Kanäle als
Fahrantrieb und der dritte Kanal für die Ansteuerung einer Show-Waffe dient.
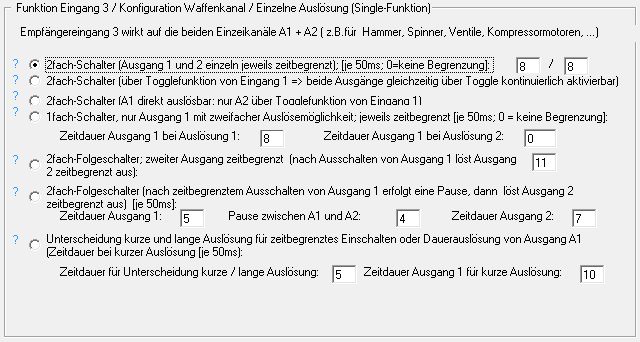
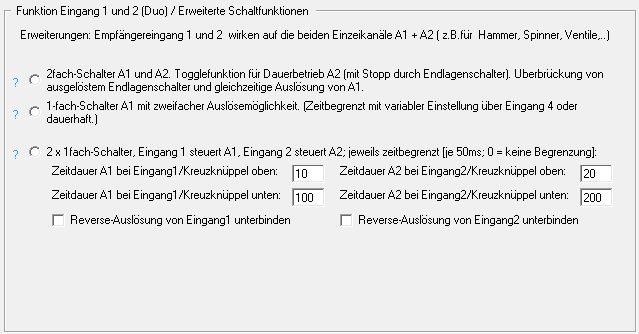
Dabei sind universelle Ansteuerungen (vorwärts/rückwärts, zeitbegrenzt,
Einzelschalten von zwei Ventilen, etc,...) möglich.
Für eine Wegebegrenzung sind zwei Anschlüsse für Endlagenschalter vorhanden.
Als Leistungshalbleiter werden Infineon-Halbbrücken eingesetzt Die erreichbare Stromstärke liegt damit laut Datenblatt bei maximal 55 Ampere.
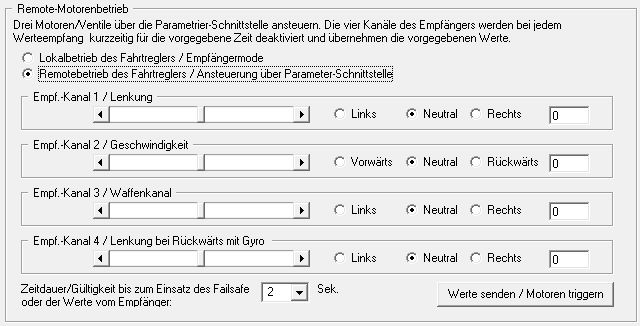
Der vierte Eingangskanal kann wahlweise für den zweiten Gyroskopeingang (Rückwärtsfahrt) oder zur Ändern der Motor-Fahrtrichtung bei Fahrt der Maschine auf dem Rücken verwendet werden.
Betriebsspannung:
8 - 26V DC (max. 6S-LiPos)
Max.. Strom pro Kanal: 55A (keine Dauerlast; u.U. aktive
Kühlung erforderlich)
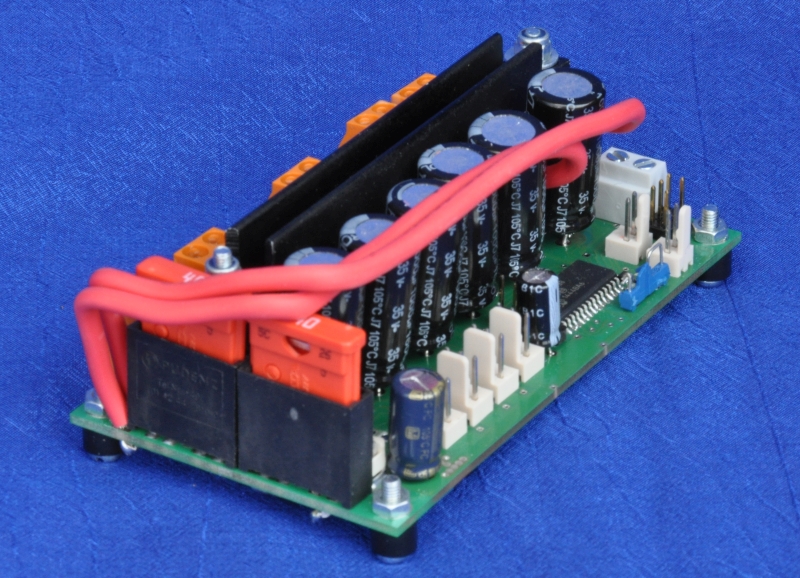
Fahrtregler4_7 (Maße 104 x 59 x 41)
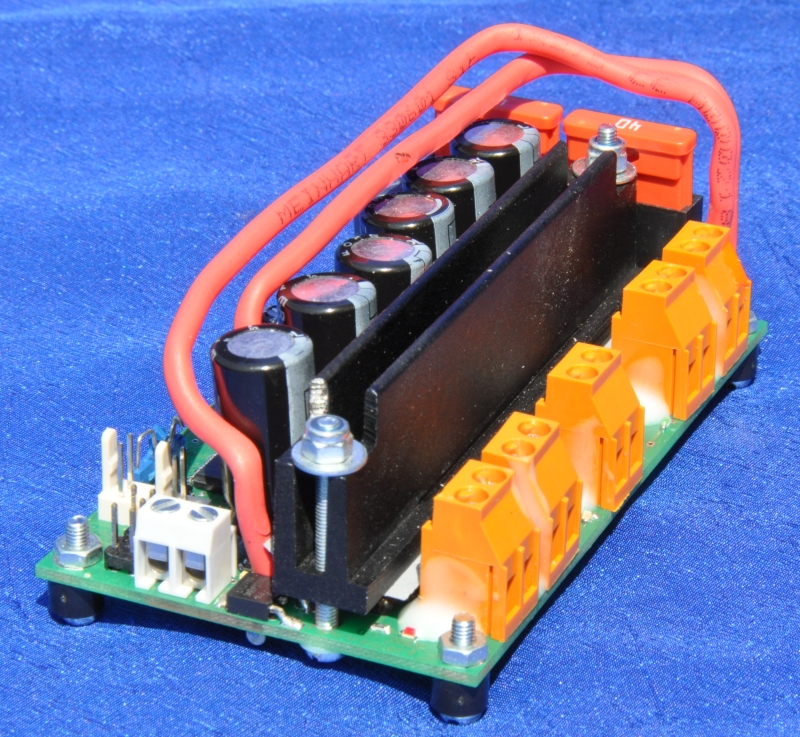
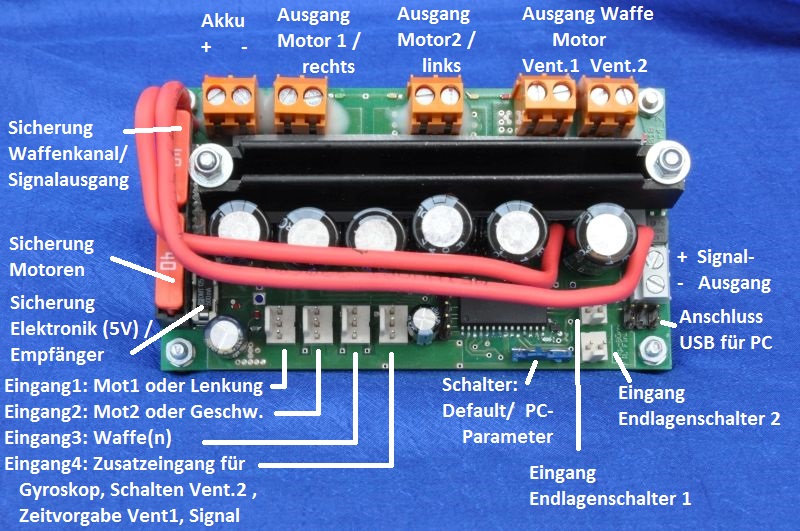
Ansicht der Anschlüsse bzw. Funktionselemente
Zwei getrennte Absicherungen für Fahrkanäle und Waffenkanal
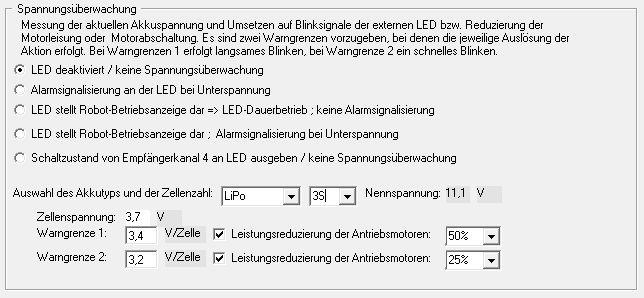
Zusätzliche Schraubklemme für Anschluss von LEDs/LED-Streifen zur Signalisierung von Unterspannung am Akku
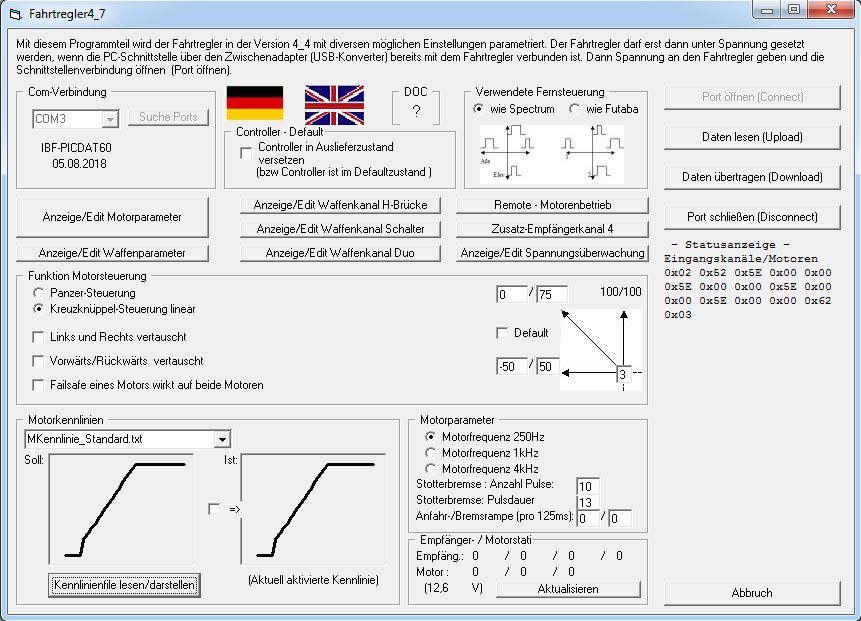
Parameter (aktiv bei geöffnetem Umschalter):